آخر المواضيع المضافة

 تاريخ الرياضيات
الرياضيات في الحضارات المختلفة
الرياضيات المتقطعة
الجبر
الهندسة
المعادلات التفاضلية و التكاملية
التحليل
علماء الرياضيات
تاريخ الرياضيات
الرياضيات في الحضارات المختلفة
الرياضيات المتقطعة
الجبر
الهندسة
المعادلات التفاضلية و التكاملية
التحليل
علماء الرياضيات | CONTROLLABILITY, BANG-BANG PRINCIPLE-CONTROLLABILITY OF LINEAR EQUATIONS. |


|
|
Read More
Date: 8-10-2016
Date: 9-10-2016
Date: 9-10-2016
|
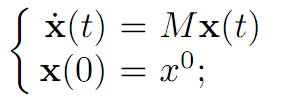
According to the variation of parameters formula, the solution of (ODE) for a given control α(.) is

where X(t) = etM. Furthermore, observe that
x0∈ C(t)
if and only if (1.1) there exists a control α(.) ∈ A such that x(t) = 0 if and only if
 (1.2)
(1.2)
If and only if
 (1.3)
(1.3)
We make use of these formulas to study the reachable set:
THEOREM 1.2 (STRUCTURE OF REACHABLE SET).
(i) The reachable set C is symmetric and convex.
(ii) Also, if x0 ∈ C(t¯), then x0 ∈ C(t) for all times t ≥ t-.
DEFINITIONS.
(i) We say a set S is symmetric if x ∈ S implies −x ∈ S.
(ii) The set S is convex if x, xˆ ∈ S and 0 ≤ λ ≤ 1 imply λx + (1 − λ) xˆ ∈ S.
Proof. 1. (Symmetry) Let t ≥ 0 and x0 ∈ C(t). Then

for some admissible control α ∈ A. Therefore

−α ∈ A since the set A is symmetric. Therefore −x0 ∈ C(t), and so each set C(t) symmetric. It follows that C is symmetric.
2. (Convexity) Take

for appropriate times t, tˆ ≥ 0. Assume t ≤ tˆ. Then

Define a new control
and hence x0 ∈ C(tˆ). Now let 0 ≤ λ ≤ 1, and observe

3. Assertion (ii) follows from the foregoing if we take t¯= tˆ.
A SIMPLE EXAMPLE. Let n = 2 and m = 1, A = [−1, 1], and write x(t) = (x1(t), x2(t))T . Suppose
This is a system of the form x˙ = Mx + Nα, for
Clearly C = {(x1, x2) | x1 = 0}, the x2–axis.
We next wish to establish some general algebraic conditions ensuring that C contains a neighborhood of the origin.
DEFINITION. The controllability matrix is

THEOREM 1.3 (CONTROLLABILITY MATRIX). We have
Rank G = n
and only if
0 ∈ C◦.
NOTATION. We write C◦ for the interior of the set C. Remember that
rank of G = number of linearly independent rows of G
= number of linearly independent columns of G.
Clearly rank G ≤ n.
Proof. 1. Suppose first that rank G < n. This means that the linear span of the columns of G has dimension less than or equal to n − 1. Thus there exists a vector b ∈ Rn, b = 0, orthogonal to each column of G. This implies
bTG = 0
and so
bTN = bTMN = ….. = bTMn−1N = 0.
2. We claim next that in fact
(1.4) bTMkN = 0 for all positive integers k.
To confirm this, recall that
p(λ) := det(λI −M)
is the characteristic polynomial of M. The Cayley–Hamilton Theorem states that
p(M) = 0.
So if we write
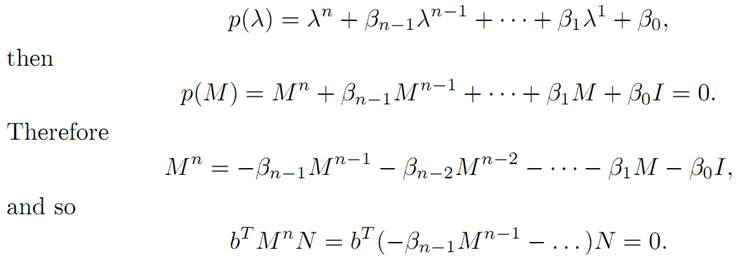
Similarly,

The claim (1.4) is proved.
Now notice that

according to (1.4).
3. Assume next that x0 ∈ C(t). This is equivalent to having

This says that b is orthogonal x0 . In other words, C must lie in the hyperplane orthogonal to b ≠ 0. Consequently C◦ = ∅.
4. Conversely, assume 0 ∉C◦. Thus 0 ∉C◦(t) for all t > 0. Since C(t) is convex, there exists a supporting hyperplane to C(t) through 0. This means that there exists b = 0 such that b. x0 ≤ 0 for all x0 ∈ C(t).
Choose any x0 ∈ C(t). Then
for some control α, and therefore
We assert that therefore
(1.5) bTX−1 (s)N ≡ 0,
a proof of which follows as a lemma below. We rewrite (2.5) as
(1.6) bT e−sMN ≡ 0.
Let s = 0 to see that bTN = 0. Next differentiate (1.6) with respect to s, to find that
bT (−M)e−sMN ≡ 0.
For s = 0 this says
bTMN = 0.
We repeatedly differentiate, to deduce
bTMkN = 0 for all k = 0, 1, . . . ,
and so bTG = 0. This implies rank G < n, since b = 0.
LEMMA 1.4 (INTEGRAL INEQUALITIES). Assume that
 (1.7)
(1.7)
for all α(.) ∈ A. Then
bTX−1 (s)N ≡ 0.
Proof. Replacing α by −α in (1.7), we see that
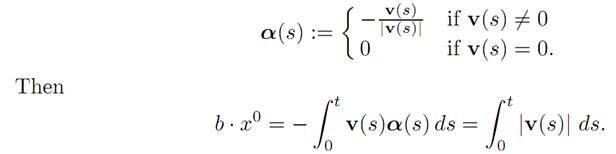
for all α(.) ∈ A. Define
v(s) := bTX−1 (s)N.
If v /≡ 0, then v(s0)≠0 for some s0. Then there exists an interval I such that s0 ∈ I and v = 0 on I. Now define α(.) ∈ A this way:
This implies the contradiction that v ≡ 0 in I.
DEFINITION. We say the linear system (ODE) is controllable if C = Rn.
THEOREM 1.5 (CRITERION FOR CONTROLLABILITY). Let A be the cube [−1, 1] n in Rn. Suppose as well that rank G = n, and Re λ < 0 for each
eigenvalue λ of the matrix M.
Then the system (ODE) is controllable.
Proof. Since rank G = n, Theorem 1.3 tells us that C contains some ball B centered at 0. Now take any x0 ∈ Rn and consider the evolution
in other words, take the control α(.) ≡ 0. Since Re λ < 0 for each eigenvalue λ of M, then the origin is asymptotically stable. So there exists a time T such that x(T) ∈ B. Thus x(T) ∈ B ⊂ C; and hence there exists a control α(.) ∈ A steering x(T) into 0 in finite time.
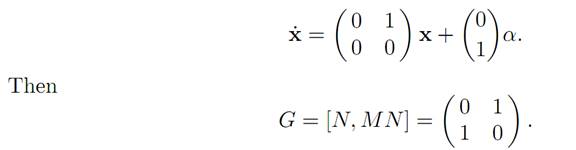
EXAMPLE. We once again consider the rocket railroad car, from §1.2, for which n = 2, m = 1, A = [−1, 1], and
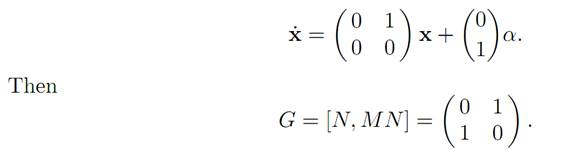
Therefore
rank G = 2 = n.
Also, the characteristic polynomial of the matrix M is
Since the eigenvalues are both 0, we fail to satisfy the hypotheses of Theorem 1.5.
This example motivates the following extension of the previous theorem:
THEOREM 1.6 (IMPROVED CRITERION FOR CONTROLLABILITY). Assume rank G = n and Re λ ≤ 0 for each eigenvalue λ of M.
Then the system (ODE) is controllable.
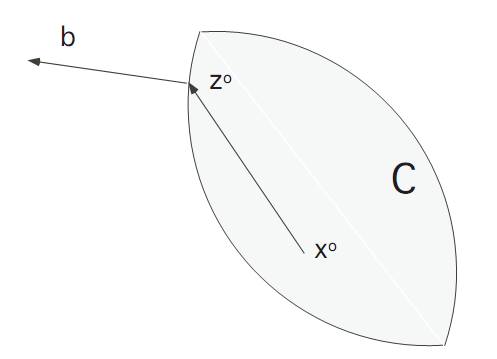
Proof. 1. If C≠ Rn, then the convexity of C implies that there exist a vector b ≠0 and a real number μ such that
(1.8) b .x0≤ μ
for all x0 ∈ C. Indeed, in the picture we see that b .(x0 − z0) ≤ 0; and this implies (1.8) for μ := b . z0.
We will derive a contradiction.
2. Given b≠0,μ∈ R, our intention is to find x0 ∈ C so that (1.8) fails. Recall x0 ∈ C if and only if there exist a time t > 0 and a control α(.) ∈ A such that
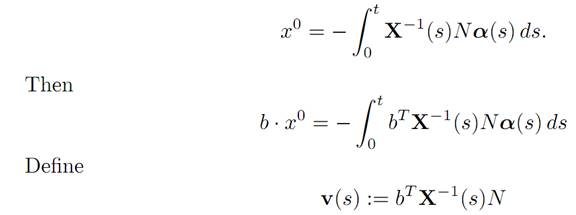
 (1.9)
(1.9)
To see this, suppose instead that v ≡ 0. Then k times differentiate the expression bTX−1(s)N with respect to s and set s = 0, to discover
bTMkN = 0
for k = 0, 1, 2, . . . . This implies b is orthogonal to the columns of G, and so rank G < n. This is a contradiction to our hypothesis, and therefore (1.9) holds.
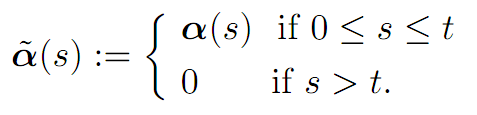
4. Next, define α(.) this way:
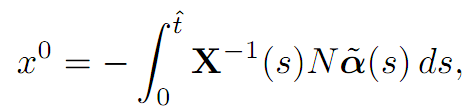
We want to find a time t > 0 so that
In fact, we assert that
 (1.10)
(1.10)
To begin the proof of (1.10), introduce the function
We will find an ODE φ satisfies. Take p(.) to be the characteristic polynomial of M. Then

since p(M) = 0, according to the Cayley–Hamilton Theorem. But since p (− d/dt) v(t) ≡0, it follows that

Hence φ solves the (n + 1)th order ODE
We also know Let μ1, . . . ,μ n+1 be the solutions of μ p(−μ) = 0. According to ODE theory, we can write
Let μ1, . . . ,μ n+1 be the solutions of μ p(−μ) = 0. According to ODE theory, we can write
φ(t) = sum of terms of the form pi(t)eμ it
for appropriate polynomials pi(.).
Furthermore, we see that μn+1 = 0 and μk = −λk, where λ1, . . . , λn are the eigenvalues of M. By assumption Re μk ≥ 0, for k = 1, . . . , n. If

Then

that is, φ(t) → 0 as t → ∞. This is a contradiction to the representation formula of φ(t) = Σpi(t)eμit, with Re μi ≥ 0. Assertion (1.10) is proved.
5. Consequently given any μ, there exists t > 0 such that
a contradiction to (1.8). Therefore C = Rn.
References
[B-CD] M. Bardi and I. Capuzzo-Dolcetta, Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equations, Birkhauser, 1997.
[B-J] N. Barron and R. Jensen, The Pontryagin maximum principle from dynamic programming and viscosity solutions to first-order partial differential equations, Transactions AMS 298 (1986), 635–641.
[C1] F. Clarke, Optimization and Nonsmooth Analysis, Wiley-Interscience, 1983.
[C2] F. Clarke, Methods of Dynamic and Nonsmooth Optimization, CBMS-NSF Regional Conference Series in Applied Mathematics, SIAM, 1989.
[Cr] B. D. Craven, Control and Optimization, Chapman & Hall, 1995.
[E] L. C. Evans, An Introduction to Stochastic Differential Equations, lecture notes avail-able at http://math.berkeley.edu/˜ evans/SDE.course.pdf.
[F-R] W. Fleming and R. Rishel, Deterministic and Stochastic Optimal Control, Springer, 1975.
[F-S] W. Fleming and M. Soner, Controlled Markov Processes and Viscosity Solutions, Springer, 1993.
[H] L. Hocking, Optimal Control: An Introduction to the Theory with Applications, OxfordUniversity Press, 1991.
[I] R. Isaacs, Differential Games: A mathematical theory with applications to warfare and pursuit, control and optimization, Wiley, 1965 (reprinted by Dover in 1999).
[K] G. Knowles, An Introduction to Applied Optimal Control, Academic Press, 1981.
[Kr] N. V. Krylov, Controlled Diffusion Processes, Springer, 1980.
[L-M] E. B. Lee and L. Markus, Foundations of Optimal Control Theory, Wiley, 1967.
[L] J. Lewin, Differential Games: Theory and methods for solving game problems with singular surfaces, Springer, 1994.
[M-S] J. Macki and A. Strauss, Introduction to Optimal Control Theory, Springer, 1982.
[O] B. K. Oksendal, Stochastic Differential Equations: An Introduction with Applications, 4th ed., Springer, 1995.
[O-W] G. Oster and E. O. Wilson, Caste and Ecology in Social Insects, Princeton UniversityPress.
[P-B-G-M] L. S. Pontryagin, V. G. Boltyanski, R. S. Gamkrelidze and E. F. Mishchenko, The Mathematical Theory of Optimal Processes, Interscience, 1962.
[T] William J. Terrell, Some fundamental control theory I: Controllability, observability, and duality, American Math Monthly 106 (1999), 705–719.
|
|
|
|
للعاملين في الليل.. حيلة صحية تجنبكم خطر هذا النوع من العمل
|
|
|
|
|
|
|
"ناسا" تحتفي برائد الفضاء السوفياتي يوري غاغارين
|
|
|
|
|
|
|
بمناسبة مرور 40 يومًا على رحيله الهيأة العليا لإحياء التراث تعقد ندوة ثقافية لاستذكار العلامة المحقق السيد محمد رضا الجلالي
|
|
|