تاريخ الفيزياء
علماء الفيزياء


الفيزياء الكلاسيكية
الميكانيك
الديناميكا الحرارية
الكهربائية والمغناطيسية
الكهربائية
المغناطيسية
الكهرومغناطيسية
علم البصريات
تاريخ علم البصريات
الضوء
مواضيع عامة في علم البصريات
الصوت
الفيزياء الحديثة
النظرية النسبية
النظرية النسبية الخاصة
النظرية النسبية العامة
مواضيع عامة في النظرية النسبية
ميكانيكا الكم
الفيزياء الذرية
الفيزياء الجزيئية
الفيزياء النووية
مواضيع عامة في الفيزياء النووية
النشاط الاشعاعي
فيزياء الحالة الصلبة
الموصلات
أشباه الموصلات
العوازل
مواضيع عامة في الفيزياء الصلبة
فيزياء الجوامد
الليزر
أنواع الليزر
بعض تطبيقات الليزر
مواضيع عامة في الليزر
علم الفلك
تاريخ وعلماء علم الفلك
الثقوب السوداء
المجموعة الشمسية
الشمس
كوكب عطارد
كوكب الزهرة
كوكب الأرض
كوكب المريخ
كوكب المشتري
كوكب زحل
كوكب أورانوس
كوكب نبتون
كوكب بلوتو
القمر
كواكب ومواضيع اخرى
مواضيع عامة في علم الفلك
النجوم
البلازما
الألكترونيات
خواص المادة
الطاقة البديلة
الطاقة الشمسية
مواضيع عامة في الطاقة البديلة
المد والجزر
فيزياء الجسيمات
الفيزياء والعلوم الأخرى
الفيزياء الكيميائية
الفيزياء الرياضية
الفيزياء الحيوية
الفيزياء والفلسفة
الفيزياء العامة
مواضيع عامة في الفيزياء
تجارب فيزيائية
مصطلحات وتعاريف فيزيائية
وحدات القياس الفيزيائية
طرائف الفيزياء
مواضيع اخرى

Angular momentum of a solid body
 المؤلف:
Richard Feynman, Robert Leighton and Matthew Sands
المؤلف:
Richard Feynman, Robert Leighton and Matthew Sands
 المصدر:
The Feynman Lectures on Physics
المصدر:
The Feynman Lectures on Physics
 الجزء والصفحة:
Volume I, Chapter 20
الجزء والصفحة:
Volume I, Chapter 20
 2024-03-08
2024-03-08
 1889
1889


+
-
20
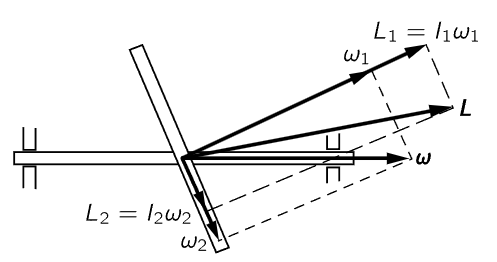
Fig. 20–6. The angular momentum of a rotating body is not necessarily parallel to the angular velocity.
Before we leave the subject of rotations in three dimensions, we shall discuss, at least qualitatively, a few effects that occur in three-dimensional rotations that are not self-evident. The main effect is that, in general, the angular momentum of a rigid body is not necessarily in the same direction as the angular velocity. Consider a wheel that is fastened onto a shaft in a lopsided fashion, but with the axis through the center of gravity, to be sure (Fig. 20–6). When we spin the wheel around the axis, anybody knows that there will be shaking at the bearings because of the lopsided way we have it mounted. Qualitatively, we know that in the rotating system there is centrifugal force acting on the wheel, trying to throw its mass as far as possible from the axis. This tends to line up the plane of the wheel so that it is perpendicular to the axis. To resist this tendency, a torque is exerted by the bearings. If there is a torque exerted by the bearings, there must be a rate of change of angular momentum. How can there be a rate of change of angular momentum when we are simply turning the wheel about the axis? Suppose we break the angular velocity ω into components ω1 and ω2 perpendicular and parallel to the plane of the wheel. What is the angular momentum? The moments of inertia about these two axes are different, so the angular momentum components, which (in these particular, special axes only) are equal to the moments of inertia times the corresponding angular velocity components, are in a different ratio than are the angular velocity components. Therefore, the angular momentum vector is in a direction in space not along the axis. When we turn the object, we have to turn the angular momentum vector in space, so we must exert torques on the shaft.
Although it is much too complicated to prove here, there is a very important and interesting property of the moment of inertia which is easy to describe and to use, and which is the basis of our above analysis. This property is the following: Any rigid body, even an irregular one like a potato, possesses three mutually perpendicular axes through the CM, such that the moment of inertia about one of these axes has the greatest possible value for any axis through the CM, the moment of inertia about another of the axes has the minimum possible value, and the moment of inertia about the third axis is intermediate between these two (or equal to one of them). These axes are called the principal axes of the body, and they have the important property that if the body is rotating about one of them, its angular momentum is in the same direction as the angular velocity. For a body having axes of symmetry, the principal axes are along the symmetry axes.
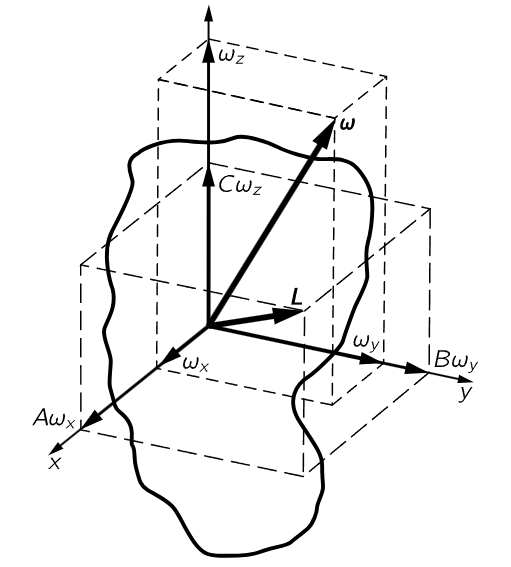
Fig. 20–7. The angular velocity and angular momentum of a rigid body (A>B>C).
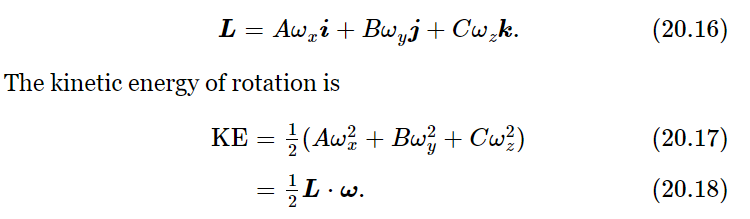
If we take the x-, y-, and z-axes along the principal axes, and call the corresponding principal moments of inertia A, B, and C, we may easily evaluate the angular momentum and the kinetic energy of rotation of the body for any angular velocity ω. If we resolve ω into components ωx, ωy, and ωz along the x-, y-, z-axes, and use unit vectors i, j, k, also along x, y, z, we may write the angular momentum as
 الاكثر قراءة في الميكانيك
الاكثر قراءة في الميكانيك
 اخر الاخبار
اخر الاخبار
اخبار العتبة العباسية المقدسة

الآخبار الصحية


 قسم الشؤون الفكرية يصدر كتاباً يوثق تاريخ السدانة في العتبة العباسية المقدسة
قسم الشؤون الفكرية يصدر كتاباً يوثق تاريخ السدانة في العتبة العباسية المقدسة "المهمة".. إصدار قصصي يوثّق القصص الفائزة في مسابقة فتوى الدفاع المقدسة للقصة القصيرة
"المهمة".. إصدار قصصي يوثّق القصص الفائزة في مسابقة فتوى الدفاع المقدسة للقصة القصيرة (نوافذ).. إصدار أدبي يوثق القصص الفائزة في مسابقة الإمام العسكري (عليه السلام)
(نوافذ).. إصدار أدبي يوثق القصص الفائزة في مسابقة الإمام العسكري (عليه السلام)